CTM represents the foundational platform that has become the de facto standard for coordinating and managing autonomous systems in the same way Cisco established itself as the backbone of networking infrastructure. Just as Cisco switches and routers became ubiquitous across enterprises, CTM has emerged as the critical middleware that enables disparate autonomous agents—whether robots, drones, or software agents—to communicate, coordinate tasks, and operate within shared environments without constant human intervention. The comparison runs deep: Cisco didn’t just sell hardware; it created an ecosystem and a standard that entire industries built upon, and CTM is doing the same for the autonomous systems market.
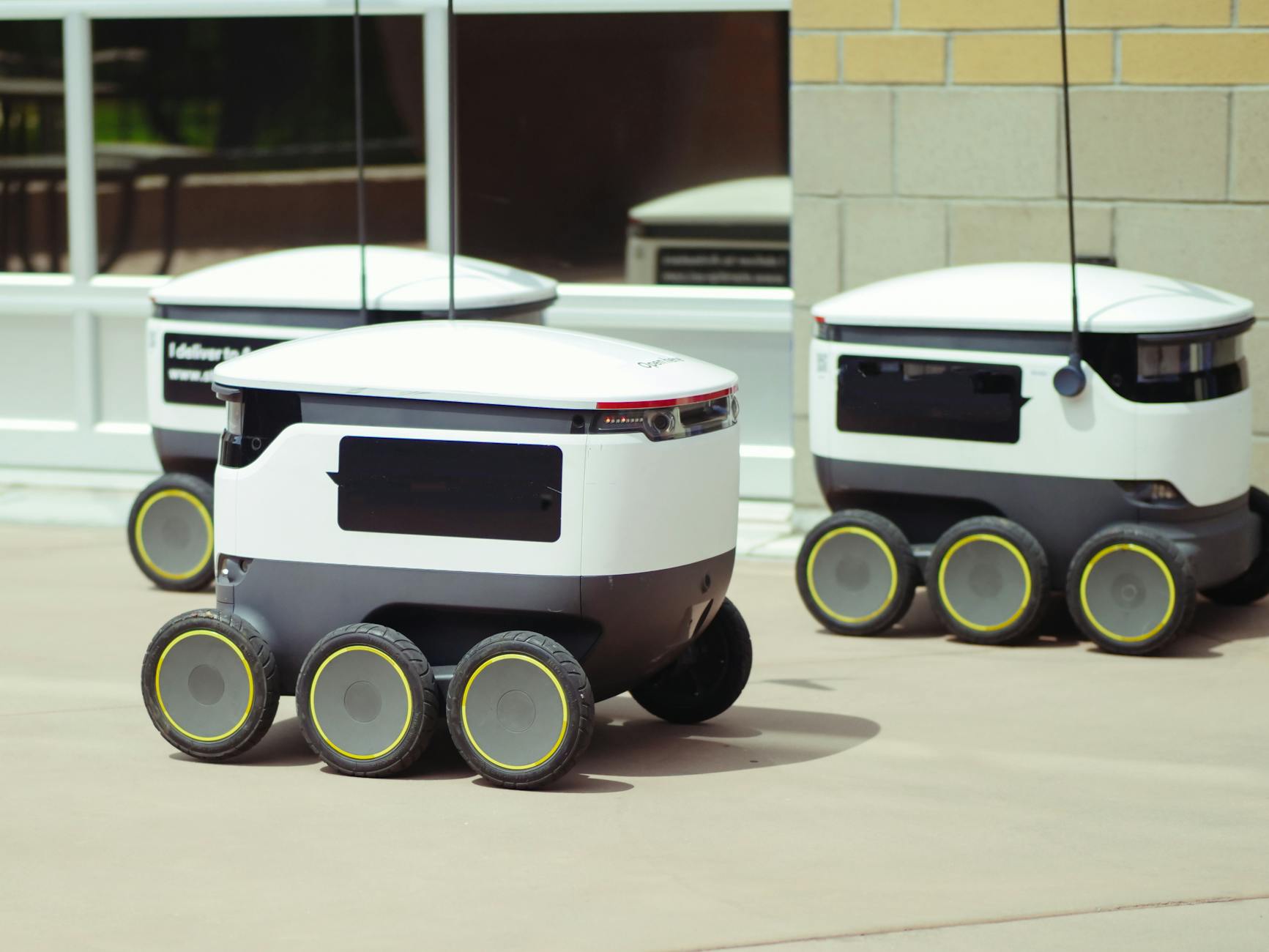
Consider a modern warehouse operation using autonomous forklifts and collaborative robots. Without a unifying coordination layer, each robot would operate in isolation, creating collision risks and inefficient workflows. CTM provides that coordination layer, allowing hundreds of autonomous agents to understand task priorities, share state information, and dynamically reassign jobs based on real-time conditions. It’s not flashy technology—most end users never see it—but the entire autonomous operation depends on it functioning seamlessly.
Table of Contents
- Why CTM Became the Standard for Autonomous Coordination
- Architecture and the Critical Middleware Challenge
- Ecosystem Effects and Vendor Lock-In Concerns
- Practical Implementation and the Costs of Adoption
- Reliability Challenges and Failure Modes
- CTM’s Role in Mixed Autonomous-Human Environments
- The Future Evolution and Competitive Pressures
- Conclusion
Why CTM Became the Standard for Autonomous Coordination
ctm‘s dominance stems from a deliberate approach to standardization that mirrors Cisco’s early networking strategy. By establishing open APIs and supporting interoperability across different manufacturers’ autonomous systems, CTM solved a critical problem: the fragmentation of autonomous deployments. Before CTM gained widespread adoption, enterprises faced a nightmare scenario where robots from different vendors couldn’t communicate, leading to expensive custom integration work and vendor lock-in. The manufacturing sector provides a clear example of this standardization effect.
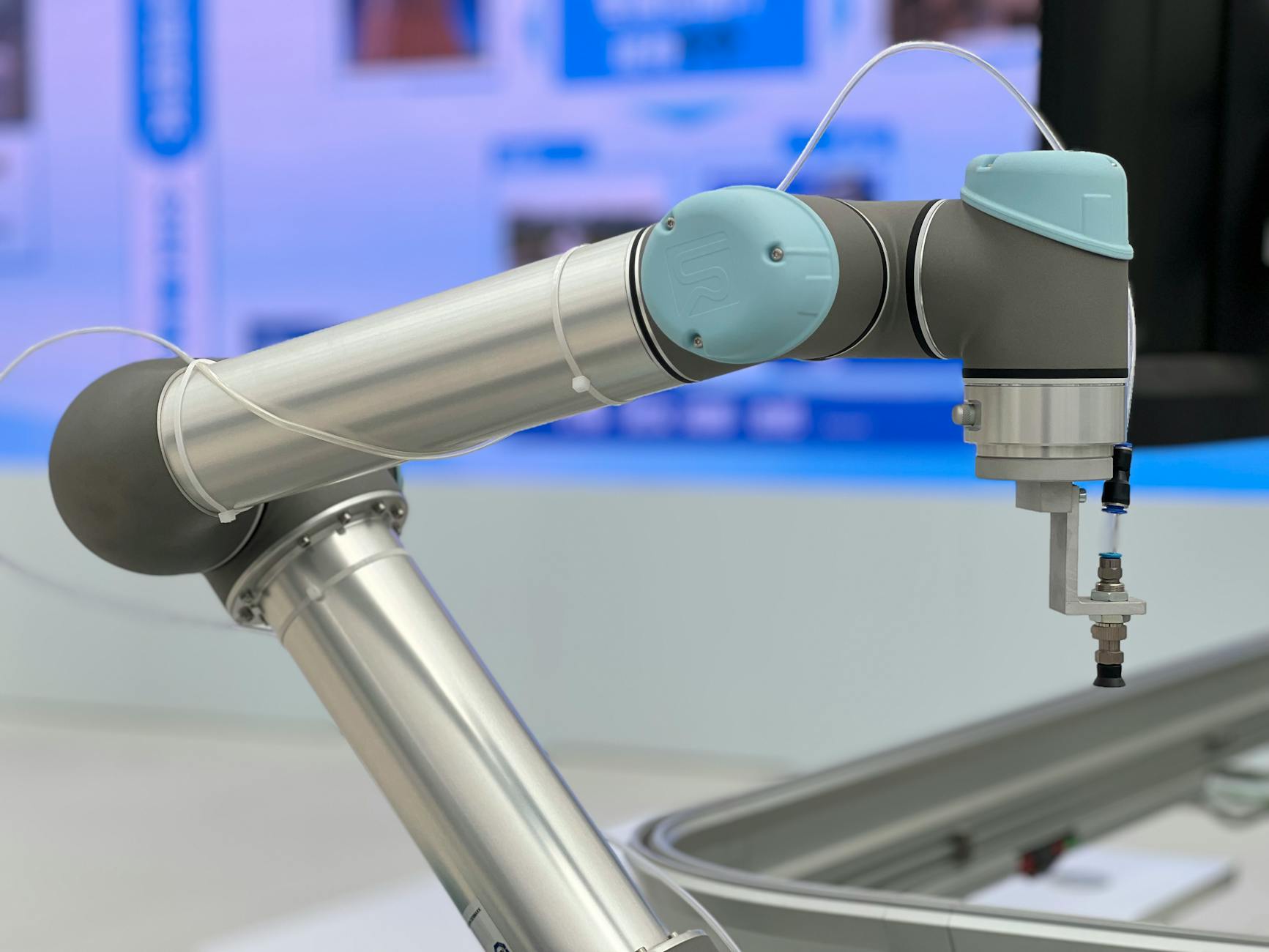
A large automotive supplier might use ABB robots for heavy material handling, Boston Dynamics quadrupeds for inspection tasks, and custom autonomous mobile robots for parts delivery. In a pre-CTM environment, integrating these three systems would require custom middleware and months of engineering. With CTM, each robot connects to the same task management layer, understands the same priority protocols, and can hand off tasks to one another. This reduced time-to-deployment from months to weeks and dramatically lowered the barrier to mixed-vendor autonomous fleets.
Architecture and the Critical Middleware Challenge
Under the hood, CTM operates as a distributed task manager that maintains real-time awareness of system state, available resources, and pending tasks. It handles the complex problems that humans rarely think about: what happens when two robots try to execute conflicting tasks? How does the system maintain consistency when network latency varies? What’s the recovery strategy when an autonomous agent fails mid-task? These questions reveal why CTM cannot be a simple scheduler—it’s a sophisticated distributed systems platform. One significant limitation deserves explicit mention: CTM’s performance depends entirely on reliable network connectivity and low latency.
In environments with WiFi dead zones, intermittent connectivity, or unpredictable latency spikes, CTM-based systems can suffer from coordination failures, delayed task execution, or deadlock situations where multiple agents are waiting for state updates that never arrive. Some industrial deployments have required extensive infrastructure upgrades—adding mesh networking hardware, deploying edge computing nodes, or using cellular backup connections—to provide the consistent network performance that CTM demands. Organizations underestimating this requirement have faced significant implementation setbacks.
Ecosystem Effects and Vendor Lock-In Concerns
Just as Cisco’s dominance created an entire ecosystem of networking vendors and integrators who built products around Cisco standards, CTM has catalyzed a robust market of compatible autonomous platforms, middleware tools, and specialized software. Robotic process automation vendors, autonomous vehicle software companies, and industrial IoT platforms now build specifically for CTM compatibility. This ecosystem amplification effect made CTM adoption a self-reinforcing decision: using CTM meant accessing the widest variety of compatible products and services.
Consider the growth of specialized simulation tools for autonomous systems. Companies like V-REP and Gazebo have extended their platforms specifically to support CTM-based workflows, allowing engineers to test autonomous fleet behavior before physical deployment. These tools wouldn’t exist or would be far less mature without CTM’s market dominance. A roboticist can now design a complex multi-robot scenario, simulate it entirely in software using CTM-compatible tools, and have high confidence that physical deployment will behave similarly—a capability that would be impossibly expensive to achieve without the standardization that CTM provides.

Practical Implementation and the Costs of Adoption
Deploying CTM is not a simple software installation. Organizations must redesign their autonomous systems architecture, retrain technical staff to understand CTM’s task specification languages and monitoring systems, and often redesign physical environments to ensure the network infrastructure can support CTM’s requirements. Smaller enterprises with limited IT resources have sometimes found CTM adoption overwhelming, discovering that they need consultants, custom development, and ongoing maintenance beyond their initial budget estimates. The comparison to Cisco’s implementation complexity is apt here.
Organizations deploying Cisco infrastructure faced similar learning curves and infrastructure costs decades ago. However, CTM offers significant tradeoffs: the organization that invests in proper CTM implementation gains flexibility and scalability that pure custom solutions cannot match. A manufacturer that successfully implements CTM might later add new robot types, change task workflows, or expand to additional facilities with relative ease. By contrast, organizations that built custom autonomous coordination systems often found themselves locked into inflexible architectures requiring complete redesigns when requirements changed.
Reliability Challenges and Failure Modes
CTM systems are only as reliable as their weakest component, and that weak point is often the network infrastructure or the central task management server. While Cisco pioneered redundancy techniques that became industry standard, CTM implementations sometimes underestimate the reliability requirements of safety-critical autonomous systems. A manufacturing robot operating near human workers cannot simply freeze when network connectivity drops; it must fail safely.
Some early CTM deployments experienced scenarios where temporary network congestion or hardware failures caused unexpected autonomous behavior or even safety incidents. Organizations deploying CTM in safety-critical environments must implement additional layers of redundancy and fallback behavior beyond what CTM provides natively. This typically includes local decision-making capabilities for robots (so they don’t rely entirely on central coordination), redundant network paths, and carefully designed timeout behaviors that specify exactly what a robot should do if it loses contact with the CTM system. Underestimating these requirements has been a common source of deployment failures and operational headaches in the industry.
CTM’s Role in Mixed Autonomous-Human Environments
One area where CTM has proven particularly valuable is in coordinating autonomous systems that must work alongside human workers. Modern warehouses and manufacturing facilities increasingly blend human workers with autonomous robots, and CTM’s task management capabilities help prevent conflicts and inefficiencies. Rather than robots operating on predefined paths or human workers manually directing each robot, CTM creates a shared understanding of task priorities and resource allocation.
A logistics company using CTM-coordinated autonomous mobile robots alongside human pickers has reported significant safety improvements. The human workers and robots operate in the same physical space but understand each other’s intentions through CTM—when a robot is approaching a particular location, the system alerts human workers; when a human worker manually moves inventory, they can update CTM to reflect that change. This coordination would be nearly impossible without a standardized task management layer.
The Future Evolution and Competitive Pressures
While CTM has achieved Cisco-like dominance in autonomous systems coordination, the technology is not static. Emerging approaches to distributed autonomous decision-making, edge computing, and local coordination algorithms are creating alternative paths that might eventually challenge CTM’s position. Some researchers question whether highly centralized task management represents the optimal architecture for future autonomous systems, particularly as systems become larger and more complex.
The parallel to Cisco’s evolution is instructive: Cisco’s dominance didn’t prevent the emergence of software-defined networking and distributed network architectures that shifted how organizations think about network infrastructure. Similarly, CTM may eventually be supplemented or partially replaced by more distributed approaches to autonomous coordination. However, for the foreseeable future, CTM remains the practical standard that any organization deploying autonomous systems must seriously consider, much as Cisco remains fundamental to modern networking infrastructure despite the industry’s evolution over decades.
Conclusion
CTM earned its comparison to Cisco not through aggressive marketing but through solving a real problem so effectively that it became the default choice for organizations building autonomous systems. The platform provided the standardization, interoperability, and ecosystem effects that the industry desperately needed, and those advantages remain compelling today. Any organization building or expanding an autonomous fleet must contend with CTM’s existence and decide whether adoption aligns with their technical requirements, resource constraints, and long-term strategy.
The key to successful CTM deployment is approaching it not as a simple software tool but as a fundamental architectural decision that shapes how autonomous systems are designed, operated, and maintained. Organizations that properly invest in CTM implementation gain capabilities and flexibility that custom solutions cannot match, but those investments are real and often underestimated. As the autonomous systems industry continues to mature, CTM’s role will likely evolve, but its foundational importance to coordination and interoperability will remain central for the foreseeable future.


